Robotic arm control
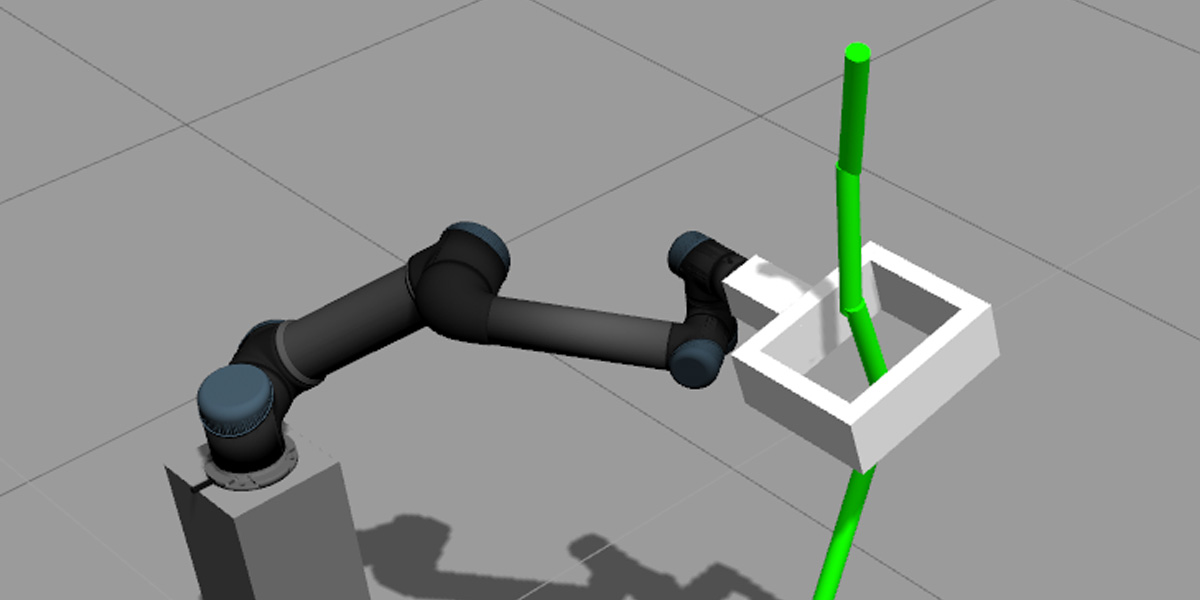
Control of a 6DOF (degree of freedom) robotic arm that follows a varying trajectory based on an end-effector sensor. Most of the application development was initially performed with use of a simulator that exactly mimics the interfaces of the real robot arm including sensors.
Contact us for more details