
Een AGV bouwen: safety-systeem
Voor een bedrijf in de industriële automatisering ligt het tegenwoordig bijna voor de hand om naar de mogelijkheden van AGV’s te kijken. Wellicht kijk je zelfs naar de mogelijkheden om er zelf een te ontwerpen en produceren. Om dat wat makkelijker te maken, hebben we deze serie artikelen geschreven. Steeds lichten we een belangrijk aspect van het systeemontwerp van een AMR (autonome mobiele robot) uit, en zetten we tips en overwegingen voor dat onderdeel op een rijtje.
In deze editie gaan we in op het safety-systeem: essentieel voor het waarborgen van de veiligheid, maar hoe bouw je dit nu het beste op?
Waarom een safety-systeem?
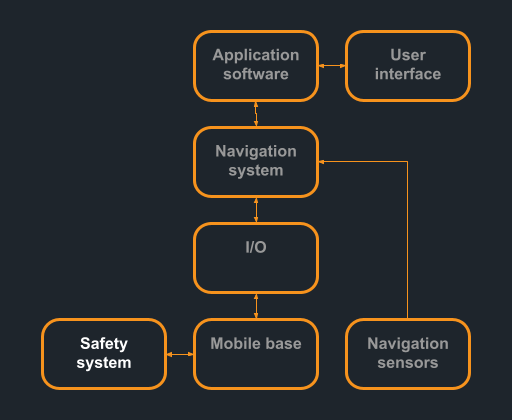
Een navigatiesysteem voor mobiele robots zal altijd proberen te voorkomen dat een AGV in botsing komt. Toch is dat in de meeste gevallen niet voldoende om veiligheid te garanderen. In industriële toepassingen is daarom vrijwel altijd een redundant safety-systeem noodzakelijk. Dit kan op verschillende manieren opgebouwd worden. Welke configuratie het beste is voor jouw robot, hangt af van de toepassing.
Sensoren
Op lage snelheden of bij kleine gewichten kan het soms voldoende zijn om een veilige bumper te installeren die de remmen inschakelt of de kracht van de motoren haalt. In industriële toepassingen is dit echter zelden voldoende. Dan is er dus een ander systeem nodig om te detecteren of er een botsing gaat plaatsvinden.
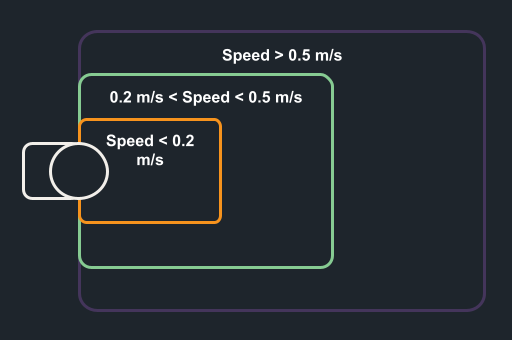
Daarvoor wordt meestal een safety-lidar gebruikt. De lidar bepaalt door middel van infrarood laserstralen de afstand tot objecten in de omgeving, en schakelt een of meerdere veilige signalen in of uit afhankelijk van deze detecties. De betere modellen kunnen ingesteld worden met zones voor verschillende dreigingsniveaus of situaties. Zo kan bijvoorbeeld bij het benaderen van een laadstation een lagere snelheid worden gekozen, waarvoor een kleiner veiligheidsgebied geldt. Er moet wel worden gelet op de plaatsing van de sensoren. Zo moet de hoogte van de montage moet aan veiligheidseisen voldoen.
Een voordeel van de lidar is dat deze vaak ook kan worden gebruikt voor het navigatiesysteem. Dit systeem kan de data gebruiken om de omgeving te herkennen en zo de plaats te bepalen, maar ook om obstakels te detecteren nog voordat deze in een van de veiligheidsvelden komen.
Schakeling
De sensor geeft input aan een schakeling die zorgt dat het voertuig stil komt te staan. Veel industriële motoren hebben een zogenaamde safe torque off-functionaliteit. Hiermee kunnen de motoren via een veilig signaal volledig gestopt worden met het leveren van koppel. Bij motoren waarin die functionaliteit niet aanwezig is, kan worden gekozen voor een safety-relais: een schakelaar die op basis van een veilig signaal de spanning van de motoren haalt.
Bij zwaardere voertuigen kan het zijn dat dit onvoldoende is, omdat de massa van het voertuig zorgt dat hij door zal rollen. In dat geval is het te overwegen om noodremmen te installeren. Een alternatief is om de motoren desgewenst kort te sluiten, zodat een koppel ontstaat tegengesteld aan de rolrichting.
Een safety-PLC maakt het mogelijk om slimmere schakelingen te programmeren. Zo kan bijvoorbeeld naar een verschillende zone van de safety-lidar gekeken worden, afhankelijk van snelheid en de navigatiemodus. Daarmee wordt het systeem minder conservatief, waardoor eventuele downtime beperkt wordt.
Inpassing in het systeem
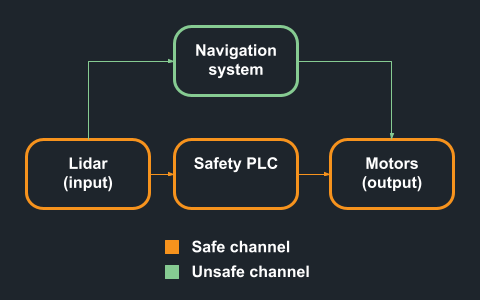
Zoals gezegd moet het safety-systeem de veiligheid waarborgen waar het navigatiesysteem dat niet kan. Het is dan ook van belang dat de twee onafhankelijk van elkaar functioneren. Zo valt het aan te bevelen om een “veilige lus” aan te leggen. Deze lus van sensor, plc en motoren is verantwoordelijk voor het waarborgen van de veiligheid van het systeem. Er mogen dan ook geen “onveilige” onderdelen in deze lus zitten, omdat daarmee de hele lus onveilig zou worden. Het navigatiesysteem kan hier dan weer bovenop worden gebouwd; vertrouwende op de gewaarborgde veiligheid in geval van nood.
Zelf aan de slag
Ga jij zelf een veiligheidssysteem inbouwen in je AGV of AMR? Laat je dan goed informeren door een expert. De keuzes voor bumpers met lage snelheid, of lidar met bredere mogelijkheden, een safety-plc en de manier van inpassen in het systeem zijn belangrijk, en zeer afhankelijk van de risico’s die komen kijken bij de toepassing van jouw robot.
We horen graag wat jouw toepassing is en voor wat voor veiligheidssysteem jij hebt gekozen! Laat het ons weten via info@ruvu.nl of via het contactformulier op de website.