
Een AGV bouwen: safety-systeem
Voor een bedrijf in de industriële automatisering ligt het tegenwoordig bijna voor de hand om naar de mogelijkheden van AGV’s te kijken. Wellicht kijk je zelfs naar de mogelijkheden om er zelf een te ontwerpen en produceren. Om dat wat makkelijker te maken, hebben we deze serie artikelen geschreven. Steeds lichten we een belangrijk aspect van het systeemontwerp van een AMR (autonome mobiele robot) uit, en zetten we tips en overwegingen voor dat onderdeel op een rijtje.
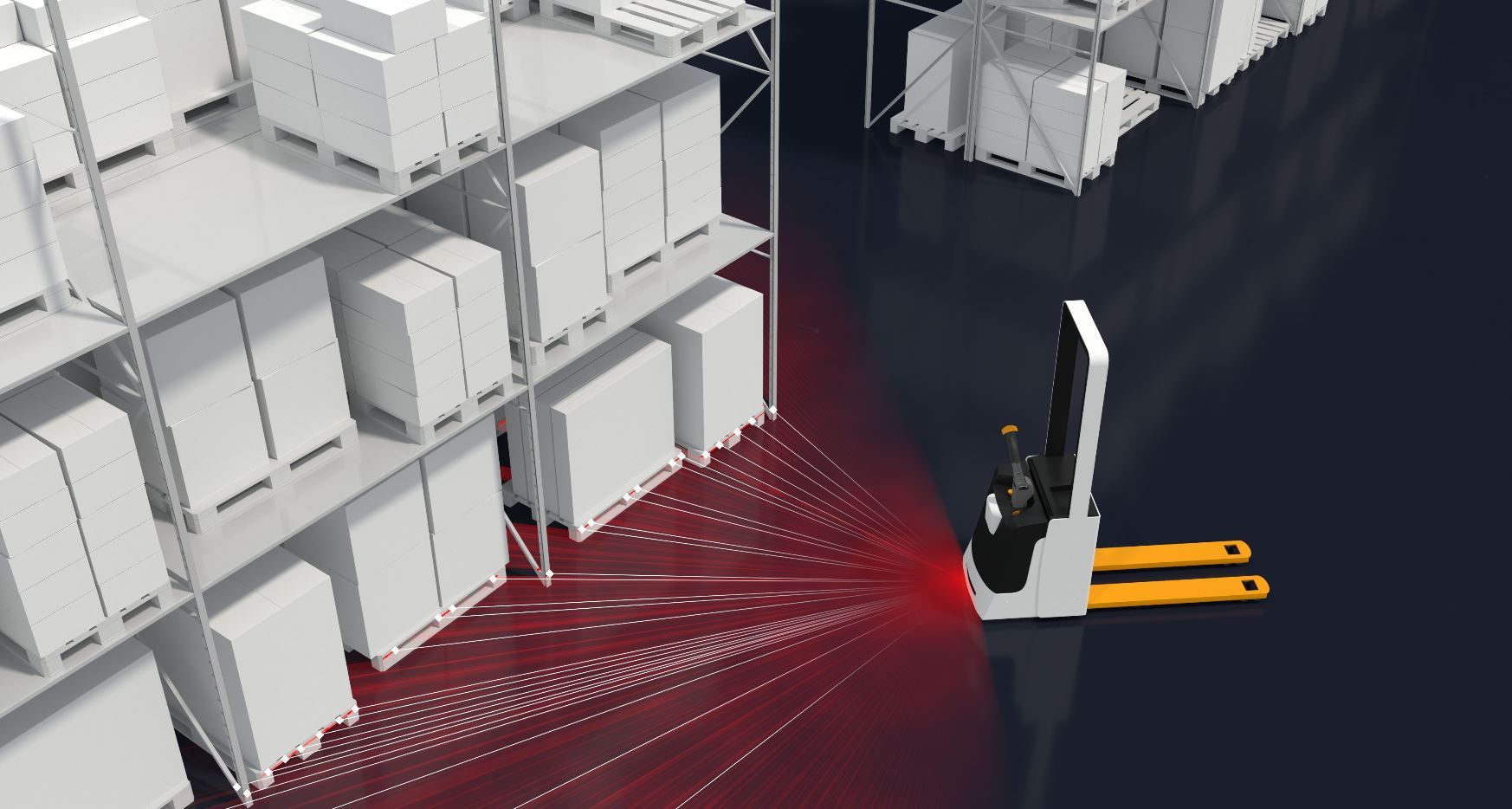
In deze editie gaan we in op het safety-systeem: essentieel voor het waarborgen van de veiligheid, maar hoe bouw je dit nu het beste op?
Continue reading