Hoe een robot van A naar B komt
In e-commerce, warehousing en logistiek worden de marges steeds kleiner. Het is steeds moeilijker om betaalbaar personeel te vinden voor het oogsten en verwerken van kasgroente en -fruit. Hetzelfde geldt voor verpleegkundigen in de zorg en vaklui in de maakindustrie. Deze ontwikkelingen vragen om automatiseringsoplossingen, waaronder Autonome Mobiele Robots (AMRs). Een aantal grote automatiseringsbedrijven investeert al veel in de ontwikkeling van dergelijke oplossingen. Maar waar moet je nu aan denken bij het regelen van zo’n systeem? Hoe krijg je zo’n voertuig van A naar B?
Verdeel en Heers
Laten we beginnen door het probleem in kleinere stukken te verdelen, die ieder op zich gemakkelijker op te lossen zijn. Om een robot autonoom van de ene plek naar de andere te laten rijden, zal hij heerst moeten weten waar hij is. In de academische wereld wordt dit het lokalisatieprobleem genoemd: het bepalen van de positie en oriëntatie (richting) van de robot in een bepaald referentiekader.
De volgende stap is het zoeken naar een pad van de huidige positie (A) naar de bestemming (B). Dit wordt navigatie genoemd. Net als in uw auto, bepaalt het navigatiesysteem een set aan instructies om van uw huidige plaats naar uw eindbestemming te komen. Ook net zoals in de auto bepaalt dit systeem niet hoe omgegaan moet worden met lokale obstakels, zoals voetgangers, of hoe een bepaalde bocht gemaakt moet worden (kan het ineens, of moet u steken?). Deze taak is aan de bestuurder, met zijn meest recente observaties van de omgeving.
Daarvoor hebben we de laatste laag nodig: de lokale controller. Deze berekent op hoge frequentie de optimale oplossing tussen het volgen van het vooraf bepaalde pad, het ontwijken van of stoppen voor obstakels, sneller het doel bereiken en tal van andere mogelijke factoren die je mee zou willen nemen. Afhankelijk van de tuning van deze controller houdt het voertuig sterker of minder sterk vast aan zijn gegeven route, en kan hij flexibeler omgaan met dynamische omstandigheden.
Lokalisatie
In traditionele AGV’s, waar een magnetische tape of inductielijn zorgt voor geleiding van het voortuig, was nooit lokalisatie nodig. Het voertuig volgt simpelweg de geleiding, en zodra dit wordt aangegeven door discrete externe signalen zoals RFID tags, voert het een bepaalde actie uit. Bij AMR’s kan dit niet zonder meer, omdat er geen fysieke geleiding meer is. De AMR moet dus zelf bepalen waar hij is, en hoe hij zich verhoudt tot het (denkbeeldige) pad dat hij moet volgen.
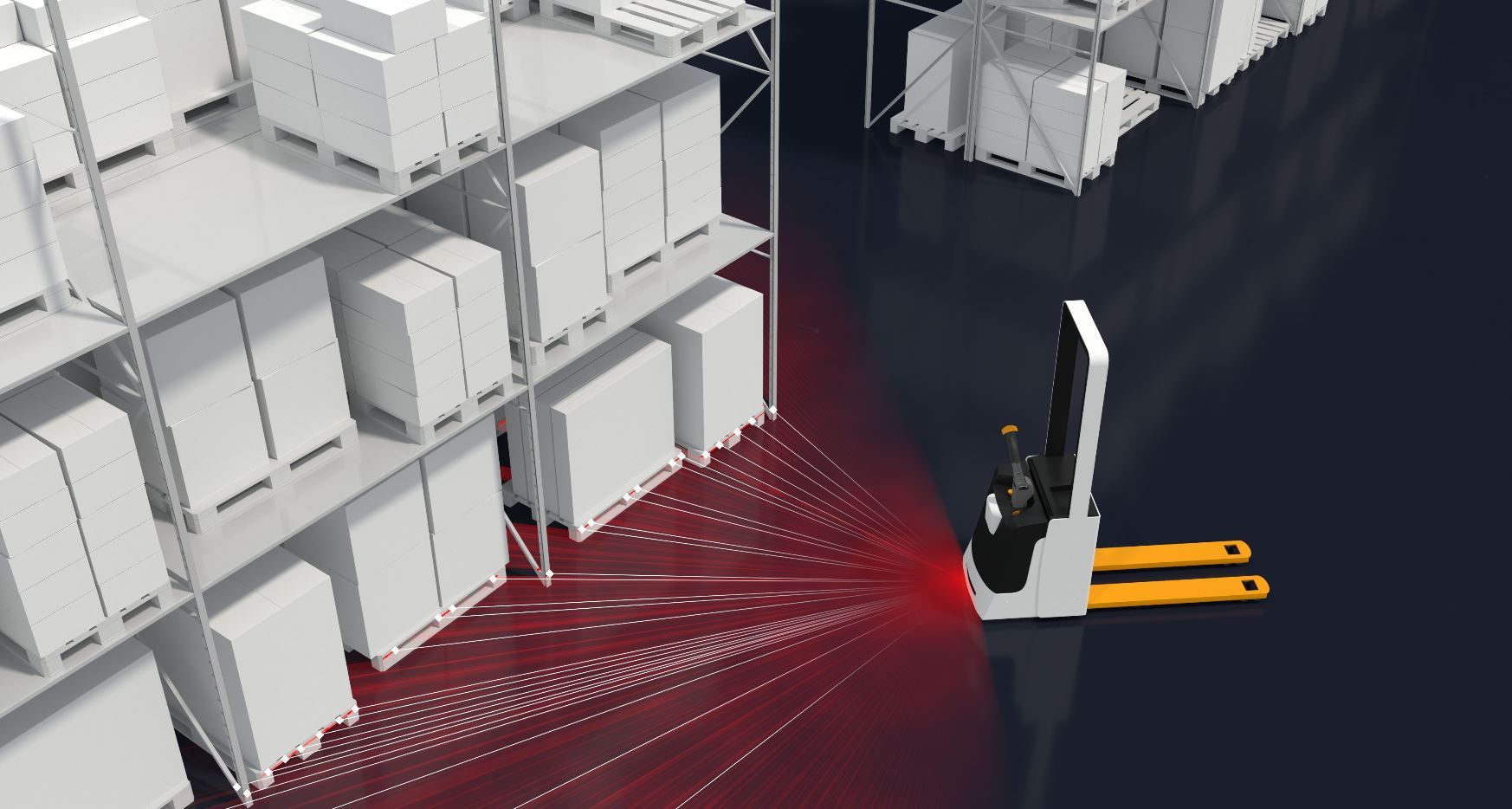
De meestgebruikte methode voor het bepalen van de positie van een mobiele robot maakt gebruik van LiDaR. Zo’n sensor meet afstanden tot objecten binnen bereik door middel van laserstralen. Deze afstanden geven een beeld van de directe omgeving van het voertuig, wat vergeleken kan worden met een vooraf bepaalde kaart van de omgeving. Door slim gebruik te maken van de laatst bekende positie en de verplaatsing sindsdien, kan onderscheid gemaakt worden tussen plaatsen die op elkaar lijken vanuit het perspectief van de laser sensor. Deze techniek wordt vaak ook Natural Navigation genoemd, omdat het geen aparte infrastructuur zoals reflectoren nodig heeft (met verwarring over de terminologie van navigatie tot gevolg). Ook wordt de techniek vaak verward met SLAM, wat staat voor Simultaneous Localization and Mapping (gelijktijdig lokaliseren en in kaart brengen). Het grote verschil is dat bij laser-lokalisatie geen kaart wordt gegenereerd. Die moet dus van tevoren al bekend zijn. Bij SLAM is een deel van de opbrengst een kaart van de omgeving, welke op zijn beurt weer gebruikt kan worden bij laser-lokalisatie.

Uiteraard werkt deze methode alleen goed als de werkomgeving van het voertuig blijvend op de kaart lijkt. In dynamischer omgevingen valt de kwaliteit van de methode uiteen tot het punt waar robots zelfs de weg volledig kwijt kunnen raken. De laatste jaren zijn aanvullende technologieën ook steeds verder ontwikkeld en betaalbaarder geworden. Zo kan Ultra-Wideband technologie met vaste beacons en een tag op het voertuig functioneren als een soort binnenshuis alternatief voor GPS. Ook zijn er sensoren beschikbaar die door middel van camerasystemen de verplaatsing ten opzichte van de vloer kunnen meten, en zelfs bepaalde segmenten terug kunnen herkennen om zo de exacte positie te bepalen. Buiten zijn satellietnavigatiesystemen een voor de hand liggende keuze. Met een vast basisstation is de nauwkeurigheid hiervan ook nog eens terug te brengen tot enkele centimeters.
Al deze methodes hebben hun eigen voor- en nadelen. Sensorfusietechnieken kunnen gebruikt worden om de voordelen van de ene te combineren met de voordelen van de andere, om tot een superieur resultaat te komen. Maar uiteindelijk bepaalt de toepassing de prestatie-eisen. Op basis van deze en aanvullende eisen en wensen kan een geïnformeerde beslissing worden genomen over welke sensoren en sensorfusie-software noodzakelijk zijn.
Navigatie
De volgende stap is navigatie. Hoe komen we van waar we zijn, naar waar we naartoe willen. Hiervoor gebruikt een AMR een kaart. Deze kaart kan verschillende vormen aannemen. De meest voorkomende vorm is vergelijkbaar met, of zelfs gelijk aan de kaart die voor LiDaR lokalisatie wordt gebruikt, en kan dus ook door middel van SLAM-techniek automatisch worden gegenereerd. Deze uitwisselbaarheid leidt echter wel tot de verwarring dat deze kaarten hetzelfde zijn.
Als een extern referentiesysteem zoals UWB of GPS wordt gebruikt, bestaat de lokalisatiekaart uit niets meer dan de posities van de beacons of satellieten. Meer is niet nodig. Op basis hiervan kunnen we de positie bepalen, en zolang we routes kennen in het zelfde coordinatenstelsel, kunnen we ze volgen. De lokalisatiekaart bevat dus alleen de oriëntatiepunten die nodig zijn voor lokalisatie.
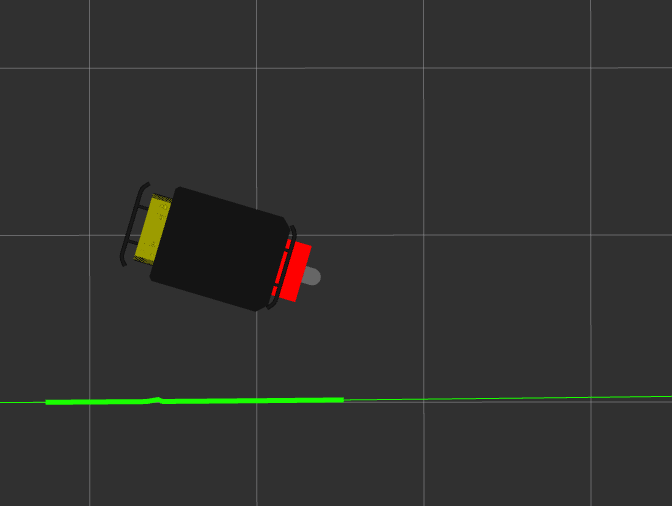
Aan de andere kant legt de navigatiekaart de ruimte vast waar de robot zich in kan bewegen. Veel fabrikanten van AMR’s rusten hun robots uit met een fijnmazige navigatiekaart waarin de vaste obstakels zijn opgenomen, zodat ze vrij zijn om hun weg zelfstandig te bepalen door alle beschikbare ruimte (vrije navigatie). Soms is het voor de gebruiker mogelijk om verboden zones of voorkeursrichtingen in te programmeren om de robots voorspelbaarder gedrag te laten vertonen. In veel gevallen wil de gebruiker echter niet dat de robot afwijkt van een vooraf bepaald pad, of alleen in uiterste gevallen. De navigatiekaart kan dan veel simpeler zijn: een set posities, aan elkaar verbonden met lijnstukken waarlangs de robot moet rijden, zoals in bovenstaande filmpje. In het algemeen is de navigatie-planner een zoekalgoritme dat het optimale pad door de navigatiekaart zoekt.
Lokale controller
Uiteindelijk zorgt de lokale controller ervoor dat de AMR de route volgt die de navigatieplanner heeft berekend. Dit lijkt relatief simpel, maar zelfs dit systeem kan geavanceerder zijn dan bij traditionele AGV’s. Waar een AGV alleen omlaag kijkt en zo een laterale afwijking van zijn huidige positie kan meten, weet een AMR hoe de route voor zich eruit ziet. Dit kan resulteren in een veel beter volggedrag, en maakt het mogelijk om slimmer om te gaan met beperkte ruimte.
Moderne lokalisatiesystemen bieden ook meer flexibiliteit in het ontwerp van de AMR. Waar de AGV zijn sensor nog voor de (achter)as geplaatst moest hebben, is dat voor de positiesensor van de AMR niet meer nodig. De AMR kan zo ook omnidirectioneel werken: in staat om in iedere richting te bewegen, zonder om te draaien.
Deze ontwerpvrijheid heeft tot gevolg dat de lokale regeling van het voertuig complexer is. Het systeem moet optimaliseren tussen het bijdraaien naar de richting van het pad en het benaderen van het pad. In het geval van een omnidirectionele robot kan deze zelfs wisselen tussen toestanden waarin hij longitudinaal, lateraal of in rotatie kan bewegen. De lokale controller heeft meestal ook de verantwoordelijkheid om om te gaan met obstakels op het navigatiepad. Deze functionaliteit vergroot de complexiteit van het optimalisatieprobleem nog verder. Als de lokale controller de situatie niet aankan, zal deze terug moeten vallen op de navigatie-planner om een nieuwe route te verzinnen.
Conclusie
Geautomatiseerde voertuigen zijn ver doorontwikkeld sinds de introductie van de eerste AGV’s. Moderne AMR’s zijn flexibeler in vele opzichten. Robots kunnen nu worden toegepast in dynamische omgevingen, terwijl ze omgaan met verstoringen in de omgeving. Ze kunnen worden gebruikt in meer toepassingen, zoals inspectie of order picking, dankzij de mogelijkheden van vrije navigatie. En ze kunnen snel geherconfigureerd worden als de omgeving wordt aangepast omdat infrastructuur goedkoop aan te leggen is, of zelfs niet eens nodig.
Deze toename in flexibiliteit betekent ook een toename in complexiteit van de systemen. Dit vergt specifieke expertise om AMR’s te ontwerpen, bouwen en programmeren. De markt voor mobiele robots groeit, dus een AMR naar uw eigen marktsegment brengen, zou een waardevolle investering kunnen blijken. Het opbouwen van expertise en het opnieuw uitvinden van het wiel kost veel tijd, geld en capaciteit, dus samenwerking is essentiëel om een concurrentievoordeel te behalen. Met de juiste partners en toeleveranciers is het mogelijk binnen enkele maanden al een succesvol product te introduceren. Neem contact met ons op om de mogelijkheden te bespreken!